A csapat tagjai
Horváth Gyula (26)
Budapesti Műszaki és Gazdaságtudományi Egyetem
Phd. hallgató, BME EET
Mechanika, konstrukció
Isza Péter (20)
Budapesti Műszaki és Gazdaságtudományi Egyetem
2. évf. villamosmérnök hallgató
PC oldali szoftver, képfeldolgozás
Marosy Gábor Elemér (22)
Budapesti Műszaki és Gazdaságtudományi Egyetem
4. évf. villamosmérnök hallgató
Mikrovezérlő programozás, vezeték nélküli kommunikáció, áramkörépítés
Srp Ágoston Mihály (21)
Budapesti Műszaki és Gazdaságtudományi Egyetem
4. évf. villamosmérnök hallgató
Áramkörépítés, motorvezérlés, akadálykerülő algoritmus, mikrovezérlő programozás
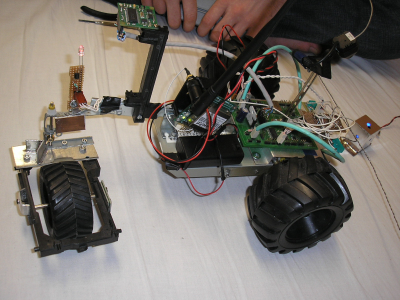
A rover
A test fő alkotóeleme régebben floppy meghajtó házaként tett szert maradandó érdemekre. A logikát tartó fedlap Tűzoltókészüléket jelző táblaként óvta a hallgatók biztonságát előző életében. A kerekek donora egy jugoszláv játékautó volt. Bolygókerket tartó fémdarab CD-meghajtó házdarabból lett hajlítva, a kompasszt minden zavartól távol tartó árboc pedig nagylemezmeghajtó előlap volt még fénykorában.
A 0.5A-es motorok 344:1-es átételen keresztül hajtják meg a kerekeket. Az Akadályérzékelés 2 db morzekapcsolóval történik, két drótból font bajusz szolgál transducerként. A motorokat egy L298-as végfok hajtja. Ennek vezérlését végzi egy PIC18F2580 mikrokontroller. A másik mikrokontroller vezérli a robot többi részét, fogadja a Wiporttól a kommunikációt. A logika tetszőlegesen bővíthető a CAN busznak hála, szenzorok és más kiegészítő áramkörök is könnyen illeszthetők I2C buszon, vagy GPIO lábakon keresztül.
Köszönet a BME Irányítástechnika és Informatika Tanszéknek és az Elektronikus Eszközök Tanszéknek, amiért sok hasznos tanáccsal segítették munkánkat és lehetőséget biztosítottak a laboratóriumok használatára.
| Alkatrész | Típus |
| Fizikai méretek: |
hossz: 380mm (392mm bolygókerék kihajtva) szélesség: 280mm (350mm bajusszal) magasság: 300mm (kamerával) |
| Motorok: | 2db 0.5A DC motor |
| Motorvezérlő: | L298, Dual full-bridge driver |
| Áttétel: | 344:1 |
| Kerék: | 2 hajtott (d=105mm), 1 bolygó (d=75mm) |
| Vezetéknélküli kapcsolat: | Lantronix WiportB |
| Mikrovezérlők: | 2db PIC18F2580 |
| On-board hálózat: | CAN busz @ 1Mbit/s |
| Pozícionálás: | Mágneses iránytű |
| Kamera: | Analóg kamera, vezetéknélküli interfésszel |
| Energiaforrás: |
WiPort: 1db LiPo akku, 3.7V Digitális: 6 db NiMh AA akku, 7.2V, 2400mAh Motorok: 4db NiMh AA akku, 4.8V, 2400mAh |
| Marsbázis OS: | Gentoo Linux |
Képek